Hand function of people with tetraplegia
Loss of hand function is often more important to people with tetraplegia than loss of lower limb function and the inability to walk.1,2 This reflects the importance of hand function for independence. The purpose of this chapter is to describe how people with different patterns of paralysis use their hands and to outline some of the splints and adaptive equipment commonly prescribed. The use of surgery and electrical stimulation to improve hand function will also be discussed.
The same generic framework advocated for devising physiotherapy programmes in Chapter 2 can be used for hand management. Initially, goals of treatment are negotiated with the patient. Goals need to also be set in conjunction with occupational therapists and other team members who share responsibility for their attainment. Goals are expressed with respect to activity limitations such as taking a spoon to the mouth and using a keyboard. Goals can also be expressed with respect to participation restrictions such as dining out with friends or returning to work. Once realistic goals are defined, impairments preventing the attainment of each goal are identified but only with respect to impairments which physiotherapy can address. These typically include poor strength, joint mobility and skill.
The hand function of patients with tetraplegia is primarily limited by neurological status (see Appendix). Below is a summary of the hand function typically attained by a patient with different ASIA motor complete lesions.
Hand function and principles of therapy
C4 and above tetraplegia
Patients with C4 and higher levels of tetraplegia have no upper limb function.
Therapy for these patients is directed at preventing contractures. It is important to prevent contractures because they can be unsightly and create problems with hygiene and personal care. Contractures of the hand are probably best avoided with prolonged stretch and regular passive movements (see Chapter 9). Prolonged stretch can be administered with splints. In patients without contractures, the appropriate type of splint is determined by the type of contractures patients are most likely to develop. For example, patients with total paralysis of the hands commonly develop metacarpophalangeal (MCP) joint hyper-extension and interphalangeal (IP) joint flexion contractures. Therefore the appropriate splint is one which immobilizes these joints in a stretched position, namely MCP joint flexion and IP joint extension (see Figure 5.1). A less aggressive ‘functional’ splint which places the hand in a neutral position does not stretch these joints and is probably less effective for preventing these types of contractures. In patients with existing contractures, the appropriate type of splint is determined on a case-by-case basis but the splint needs to provide a substantial stretch to affected joints.

C5 tetraplegia
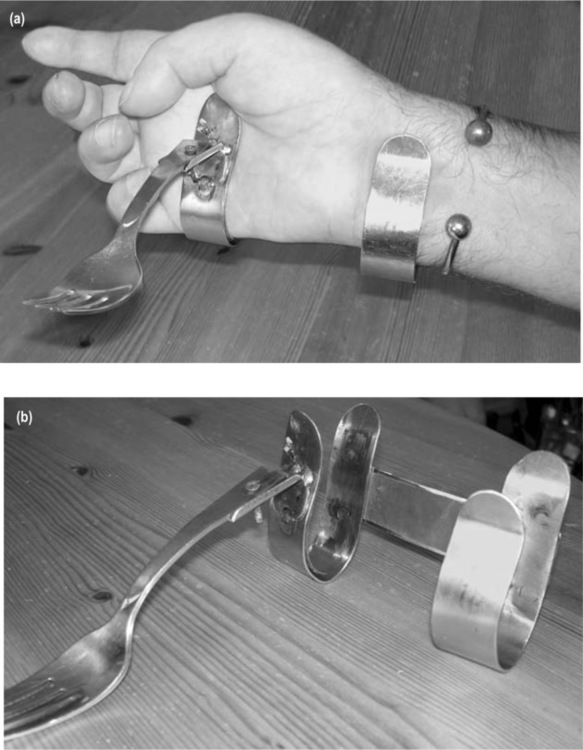
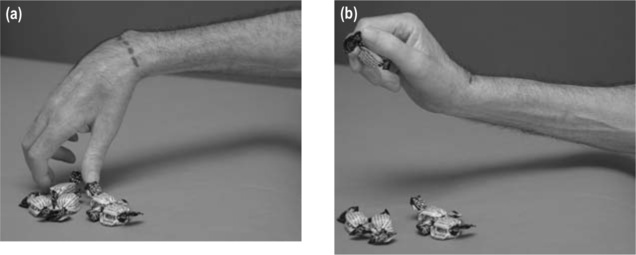
Patients with C5 tetraplegia have anti-gravity strength in their biceps muscles. Often, but not always, they have sufficient strength in their deltoids and other shoulder muscles to lift a hand to the face. However, these patients have paralysis of all wrist and hand muscles and consequently are unable to grasp objects. Instead, objects can be manipulated by clamping them between the wrists (see Figure 5.2), balancing them on an upturned hand (see Figure 5.3) or using orthoses which attach objects to the hand (see Figure 5.4). Splints are commonly used to support the wrist (see Figure 5.5).



Poor shoulder strength and passive joint mobility commonly limit the hand function of patients with C5 tetraplegia. In addition, hand function is limited by lack of skill, particularly in patients soon after spinal cord injury. That is, patients do not know how to use their paralysed hands in purposeful ways. Therapy is therefore directed at each of these three impairments using the principles outlined in Chapters 7–9.
An important additional aspect of hand management for these patients is the provision of appropriate aids, splints and orthoses (some examples of commonly prescribed hands splints are provided in Figures 5.3–5.5). This is generally the responsibility of occupational therapists. Hand function of some patients can also be improved with surgery or electrical stimulation (see p. 104).
C6 and C7 tetraplegia
Patients with C6 and C7 tetraplegia have reasonable shoulder strength and can readily bring the hand to the mouth. They have paralysis of all finger and thumb flexor muscles but they retain good strength in their wrist extensor muscles. Those with C7 tetraplegia also have some strength in their wrist flexor and finger extensor muscles. Most patients with C6 and C7 tetraplegia rely on a tenodesis grip for crude hand function (see below). Hand splints, aids, electrical stimulation and surgery are other important aspects of overall hand management (see Figures 5.6 and 5.7).3


C8 tetraplegia
Patients with C8 tetraplegia have some strength, but not full strength, in their finger and thumb flexor muscles. They therefore do not use a tenodesis grip. They do, however, have paralysis of their intrinsic hand muscles. Consequently, they have limited fine hand control. Therapy is primarily directed at strengthening finger and thumb flexor muscles, preventing contractures and practising hand activities. Hand orthoses, aids, electrical stimulation and surgery are also aspects of hand management for these patients.
Tenodesis grip
A tenodesis grip is a method of grasping used by patients with C6 and C7 tetraplegia who have paralysis of finger and thumb flexor muscles but active wrist extension. The tenodesis grip relies on passive tension generated in the paralysed extrinsic finger and thumb flexor muscles (flexor digitorum superficialis, flexor digitorum profundus and flexor pollicis longus) with wrist extension.3–8 The open hand is placed around an object with the wrist flexed. The wrist is then actively extended, increasing the passive tension in the paralysed finger and thumb flexor muscles and pulling the fingers and thumb into flexion. In this way, objects can be grasped between the paralysed thumb and index finger or in the palm of the hand (see Figures 5.8 and 5.9). A tenodesis grip provides crude but nonetheless useful hand function.7 Some patients can enhance the effectiveness of their tenodesis grip by eliciting spasm in the extrinsic thumb and finger flexor muscles with wrist extension.
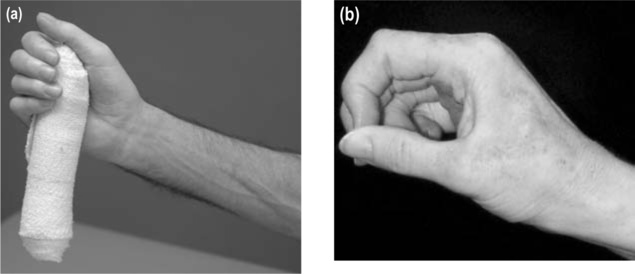
The tenodesis grip can be used to grasp objects between the thumb and index finger using either a lateral key or pincer grip. In the lateral key grip the pad of the thumb contacts the side of the index finger (see Figure 5.8b) and in the pincer grip the tip of the thumb contacts the tip of the index finger (see Figure 5.9b). The type of grip attained is primarily determined by the extensibility of the thumb adductor muscles. A pincer grip is attained if the thumb adductors are extensible and a lateral key grip is attained if the thumb adductors are inextensible. The point of contact between the thumb and index finger also depends to a lesser degree on the relative lengths of the thumb and index finger, and the extensibility of the extrinsic finger flexor muscles.3,4
A lateral key grip is generally considered easier to achieve because it requires less precision to ensure the thumb hits the side of the index finger. Provided the thumb hits anywhere along the medial aspect of the finger, some type of grip will be attained. In contrast, a pincer grip is reliant on the thumb meeting the index finger at precisely the tip of the finger. If there is slight overstretching of the thumb adductor muscles, the thumb will miss its target. When a pincer grip can be attained it provides better fine control than a lateral key grip; however, it is less powerful than a lateral key grip. Sometimes it is advantageous to promote a pincer grip in one hand and a lateral key grip in the other.
While the tenodesis grip is primarily used by patients with C6 and C7 tetraplegia, some patients with C5 tetraplegia can also use a crude type of tenodesis grip. Patients with C5 tetraplegia have paralysis of the wrist extensor muscles so they cannot actively extend the wrist to close the hand. They may, however, be able to use forearm supination to manipulate the position of the wrist. With the forearm in pronation, gravity pulls the wrist into flexion. With supination, gravity pulls the wrist into extension. Thus manipulation of the forearm can be used to change wrist position which in turn opens and closes the hand. This type of grip is sometimes called a passive tenodesis grip because wrist position is passively manipulated by forearm rotation. However, the terminology is not ideal because it implies that the tenodesis grip of patients with C6 and C7 tetraplegia is active and hence due to something more than the passive mechanical properties of the hand.
The passive tenodesis grip of people with C5 tetraplegia is of limited functional use and most patients gain superior upper limb function from splints which stabilize the wrist (see Figure 5.5). A passive tenodesis grip cannot be used in conjunction with these splints because the splints prevent passive wrist extension. However, strategies appropriate for promoting a tenodesis grip in patients with C6 and C7 tetraplegia are also appropriate for promoting a passive tenodesis grip in people with C5 tetraplegia.
Splinting and taping to promote a tenodesis grip
The effectiveness of a tenodesis grip is often compromised because of excessive extensibility in the extrinsic thumb and finger flexor muscles. When these muscles are too extensible, wrist extension produces only weak thumb and finger flexion. The best way to increase the ‘strength’ of the tenodesis grip is to induce shortening (i.e. decrease extensibility) of the extrinsic thumb and finger flexors.
Splinting and taping are widely used to encourage loss of extensibility in the extrinsic finger and thumb flexor muscles and promote a tenodesis grip. However, it remains unclear whether either intervention can decrease the passive extensibility of the extrinsic finger and thumb flexor muscles and improve hand function.8,9 This controversy is discussed in more detail below.
Splinting and taping programmes to promote a tenodesis grip may need to be withheld if patients are likely to have hand surgery. Often the effectiveness of hand surgery relies on good extensibility in the finger and thumb flexor muscles. However, the difficulty with this approach is that often the decision about hand surgery is not made until 1 or 2 years after injury. Consequently, it is not always clear which patients will and will not ultimately be suitable candidates. In addition, some patients suitable for hand surgery do not elect to have it (see p. 104 for further discussion).2 The dilemma for therapists is whether they should compromise hand function by withholding strategies designed to promote a tenodesis grip on the basis that patients may have hand surgery in the future.
A theoretical basis for splints designed to promote a tenodesis grip
Animal studies have convincingly shown that immobilization of muscles at short lengths induces shortening (see Chapter 9). On this basis, it has been argued that the best way to promote a tenodesis grip is with a splinting or taping regime which immobilizes the extrinsic finger and thumb flexor muscles in their shortened positions. To achieve this, one of two splinting regimens is probably best adopted. The more conservative approach is to splint the hand in a relatively neutral position with the MCP joints fully flexed, the IP and wrist joints extended and the thumb flexed against the side of the index finger (see Figure 5.1). This type of splint immobilizes the extrinsic finger and thumb flexor muscles in a relatively shortened position but discourages extension contractures of the MCP joints and flexion contractures of the IP joints.
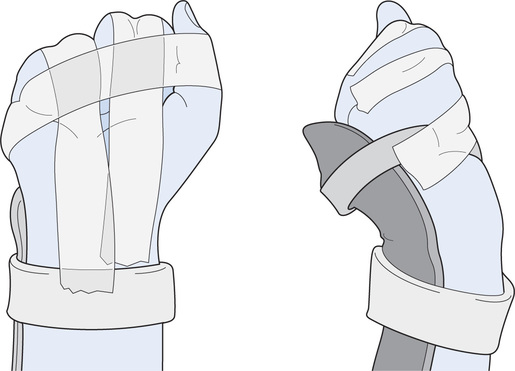
A second more aggressive approach is to flex the MCP and proximal IP joints of the fingers with the thumb positioned against the side of the index finger. This is typically done by applying tape across the back of the fingers and thumb (see Figure 5.10). The wrist is held in an extended position with a splint. The flexed position of the fingers places the extrinsic finger flexor muscles in a shortened position. However, it also substantially increases the risk of undesirable flexion contractures of the proximal IP joints. If this second approach is used, the hand needs to be carefully monitored and patients should spend at least some time of each day with the proximal IP joints in full extension. In addition, passive movements to the proximal IP joints should be regularly administered. Whenever the IP joints are extended, the wrist and MCP joints need to be flexed to avoid stretch of the extrinsic finger flexor muscles (see Figure 5.11).


The thumb requires special consideration. While it is important to maintain full passive mobility of the finger IP joints, this is not the case for the thumb. It is beneficial to hand function if the thumb IP joint becomes stiff in extension. This ensures that the pad of the thumb pushes against the side of the index finger rather than curls under the finger (see Figure 5.12). Therapists can facilitate the development of stiffness (i.e. contracture) in the thumb IP joint by splinting the joint in extension for prolonged periods of time (see Figure 5.13). This can be easily done with tape. Of course, care needs to be taken to ensure taping does not restrict circulation or cause a pressure ulcer. A more permanent and effective solution is surgical stabilization of the thumb IP joint (see discussion on surgical options below).


How long to wear splints designed to promote a tenodesis grip?
Splints need to be worn for long enough to have the desired therapeutic effects without unnecessarily impeding independence. Some therapists believe that the rapid facilitation of an effective tenodesis grip warrants short-term restriction of function imposed by an aggressive splinting regime. A more compromising approach is to apply splints only at night so the hands can be used during the day.
The length of time required to achieve an effective tenodesis grip is variable. It probably depends on many factors such as pattern of denervation and presence of spasticity and oedema. Changes in muscle extensibility may occur at differing rates within the same hand. For example, a patient may have sufficient loss of extensibility in the extrinsic finger flexor muscles but not thumb flexor muscles. Even within the extrinsic finger flexor muscles, the medial component of these muscles may have sufficient loss of extensibility before the lateral component, resulting in good passive flexion of the index and middle fingers but not the ring and little fingers.3 These factors should be considered and splinting individualized to the needs of each patient. For example, if the extrinsic finger flexor muscles have optimal extensibility but the extrinsic thumb flexor muscles do not, then a splint which continues to immobilize the thumb but not the fingers is appropriate.9 Such a splint may incorporate a thumb loop connected to a wrist band, immobilizing the carpometacarpal and MCP joints of the thumb in flexion (see Figure 5.14). Similarly if the medial components of the extrinsic finger flexor muscles have optimal extensibility but the lateral components do not, a splint that just incorporates the ring and little fingers may be indicated.

Interim results from animal studies suggest that regular use of electrical stimulation may hasten shortening of the finger and thumb flexor muscles. However, the clinical efficacy of this type of intervention has not yet been established.
A word of caution
It is important to avoid excessive loss of extensibility in the finger or thumb flexor muscles because this will be detrimental to hand function. As soon as an effective tenodesis grip is attained, therapeutic intervention may need to be directed at maintaining rather than reducing muscle extensibility. This may or may not require regular use of splints.
Some patients are at risk of excessive loss of extensibility of the finger or thumb flexor muscles. They include those patients with incomplete spinal cord injury resulting in paralysis of the finger extensor but not finger flexor muscles and patients with marked spasticity in the finger flexor muscles. It is inappropriate to splint the hands of these patients to encourage loss of extensibility. Instead, these patients may need different types of splints designed to maintain or even increase extensibility of the finger and thumb flexor muscles (e.g. some may benefit from a splint which immobilizes the MCP and IP joints in extension). This highlights the importance of anticipating and predicting losses of extensibility, individualizing therapy to patients’ needs, monitoring change and understanding the implications of loss of extensibility for function. These issues are discussed in more detail in Chapter 9.
A tenodesis grip should not be promoted in patients with incomplete injuries unless it is clear that they are not going to regain active movement of the finger and thumb flexor muscles (see Chapter 1 for time frame). It is important that normal extensibility and full range of motion is maintained in all muscles and joints.
Flexor-hinge splints
Flexor-hinge splints mechanically supplement the tenodesis grip of patients with C6 and C7 tetraplegia.10 These splints enclose the wrist and hand and mechanically guide the tips of the index and second fingers into contact with the tip of the thumb when the wrist is actively extended (see Figure 5.15).3 The fingers and thumbs are mechanically pulled into extension when the wrist flexes. Such splints are said to ‘train’ a tenodesis grip, although this terminology may be inappropriate because it implies that the action of the fingers and thumb with wrist extension depends primarily on something other than the passive mechanical properties of the hand. This would seem unlikely. It is possible that flexor-hinge splints protect the extrinsic thumb flexor and extrinsic finger flexor muscles from stretch, thereby helping to reduce extensibility. Regardless of the underlying mechanisms of action, some patients with C6 and C7 tetraplegia find flexor-hinge splints provide superior hand function and routinely use them. Most, however, find the splints bulky, expensive and cosmetically unappealing. For these reasons they are less commonly used today than 20 years ago.

Reconstructive surgery and electrical stimulation
Many surgical procedures are used to improve the hand and upper limb function of people with tetraplegia.11 Moberg,12 a Swedish hand surgeon, is generally considered the pioneer in this field. He devised widely used procedures to improve the lateral key grip of patients with C6 tetraplegia. These procedures typically involve arthrodesis of the thumb IP joint and surgical tenodesis of the extrinsic thumb flexor and extrinsic finger flexor muscles. Over the last 10 years an increasing number of sophisticated surgical procedures to improve hand function have been introduced.13 Tendon transfers from non-paralysed muscles to paralysed muscles are particularly common. These procedures enable a non-paralysed muscle to pull on the tendon of a paralysed muscle. The two most common tendon transfers are from the non-paralysed deltoid muscle to the paralysed triceps muscle or from the non-paralysed brachioradialis muscle to the paralysed extensor carpi radialis muscle, providing active elbow and wrist extension respectively. Tendon transfers can also be used to provide or strengthen the lateral key grip of patients with C6 and C7 tetraplegia. The tendon of the non-paralysed extensor carpi radialis longus muscle is transferred to the paralysed flexor digitorum profundus muscle, and the tendon of non-paralysed brachioradialis is transferred to paralysed flexor pollicis longus muscle.
Electrical stimulation can be used to stimulate paralysed muscles of the hand and upper limb. It is primarily used in people with C5 or C6 tetraplegia to provide finger and thumb movement for grasp and release.11,14–16 Stimulation can be applied with surface or implanted electrodes and is usually controlled by patients’ voluntary wrist or shoulder movements. Some electrical stimulation systems are incorporated into gloves or splints which stimulate key muscles.14,17–19 More sophisticated devices are surgically implanted, providing more refined hand function.17,20,21 Reconstructive surgery is commonly used to augment the effects of electrical stimulation. Physiotherapy involves training patients to use these devices and working with other team members to optimize stimulation parameters.
Despite the apparent success of reconstructive surgery and electrical stimulation for hand function, only a small percentage of patients opt for these interventions.22 There may be numerous reasons for this, but ease of use and social acceptance would appear to be key factors.16 It may also be that patients are reluctant to opt for invasive interventions which are associated with hospitalization and long periods of recovery.